
В этой статье расскажу об еще одном модуле на LM393, с помощью которого можно измерить скорость вращения электродвигателя, так же можно использовать в различных проектах, где необходимо подсчитать импульсы, определить положение (концевик) и так далее. В статье расскажу как использовать модуль для подсчета оборотов двигателя, на робот платформе 2WD
Технические параметры
► Ширина паза: 5мм;
► Диаметр монтажных отверстий: 3 мм;
► Индикатор состояния выхода;
► Рабочее напряжение 3.3В — 5В;
► Габариты: 32 мм х 14 мм x 14 мм;
► Вес: 3 грамма.
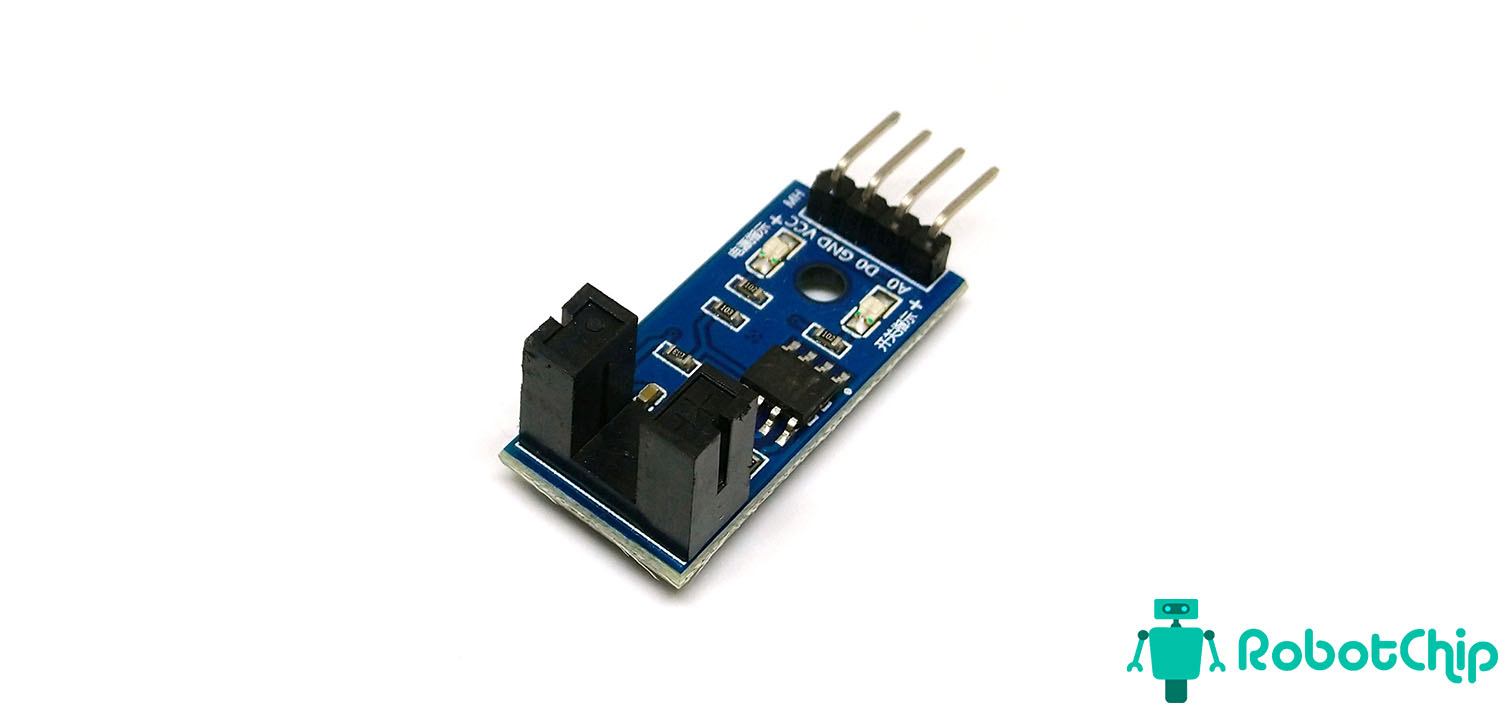
Краткий обзор модуль скорости щелевой на LM393
Модуль представляет собой простое устройство, основной элемент которого, это оптопара, состоящая из инфракрасного излучателя (диода) и фотоприемника (фототранзистор). В нормальном состоянии, если между излучателем и фотоприемником нечего нету, фотоприемник открыт, и на выходе получаем логическую «1», но если межд ними поместить любой не прозрачный объект фотоприемник закроется и на выходе получим логический «0».

Модуль освещенности с четырьмя выводами содержит два выходных контакты, аналоговый и цифровой и два контакта для подключения питания. Для считывания аналогово сигнала предусмотрен отдельный вывод «AO», с которого можно считать показания напряжения с 0 В … 3.3 В или 5 В в зависимости от используемого источника питания. Цифровой вывод DO, устанавливается в лог «0» или лог «1»

Расскажу как работает схема, основная микросхема модуля, это компаратор LM393 (U1), которая производит сравнение уровней напряжений на входах INA- (2) и INA+ (3). Чувствительность порога срабатывания уже задано, резисторами R3 и R4 с номиналами 10 кОм. В качестве оптического датчика используется оптопара, с помощью резистора R1 (180 Ом) ограничиваем ток светодиода внутри оптопары.
Назначение контактов:
► VCC: «+» питание модуля
► GND: «-» питание модуля
► D0: цифровой выход
► A0: аналоговый выход
Подключение модуля скорости к Arduino
Необходимые детали:
► Arduino UNO R3 x 1 шт.
► Модуль скорости щелевой, LM393 x 1 шт.
► Провод DuPont, 2,54 мм, 20 см, F-M (Female — Male) x 1 шт.
► Кабель USB 2.0 A-B x 1 шт.
Описание:
В качестве примера, воспользуемся щелевым диском, который идет в комплекте с робот платформой 4WD и 2WD. Установим модуль таким образом, чтобы диск располагался внутри оптопары. Сам одуль подключим к Arduino UNO, а в программе подсчитаем сколько делает оборотов обычный двигатель с редуктором, полученные данные отправим в последовательный порт.
Подключение:
Схема не сложная, необходимо всего три провода, сначала подключаем шину D0 в вывод 2 к Arduino UNO, осталось подключить питание GND к GND и VCC к 5V (можно записать и от 3.3В), схема собрана, теперь надо подготовить программную часть.

Установка библиотек:
Для работы с модулем необходимо установить библиотеку «TimerOne », для этого, перейдите в Скетч —> Подключить библиотеку —> Управление библиотеками.

В строке поиска введите «TimerOne », найдите библиотеку «TimerOne» и установите данную библиотеку.

Программа:
Запускаем среду разработки и загружаем данный скетч, затем открываем мониторинг порта.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
#include "TimerOne.h" unsigned int counter = 0; void docount() { counter++; // Увеличение счетчика на 1 } void timerIsr() { Timer1.detachInterrupt(); // Выключение таймера Serial.print("Motor Speed: "); // Отправка данных в последовательный порт int rotation = (counter / 20); // Делем, на 20 отверстий Serial.print(rotation,DEC); // Отправка данных в последовательный порт Serial.println(" Rotation per seconds"); // Отправка данных в последовательный порт counter = 0; // Обнляем переменную Timer1.attachInterrupt( timerIsr ); // Включение таймера } void setup() { Serial.begin(9600); // Открытие последовательного порта на скорости 9600 Timer1.initialize(1000000); // Установка таймера на 1 секунду attachInterrupt(0, docount, RISING); // Увеличим счетчик, когда переходит состояние с HIGH в LOW Timer1.attachInterrupt( timerIsr ); // Включение таймера } void loop() { } |
Открываем «Мониторинг порта», можно увидеть показания.


Ссылки![]() Библиотека TimerOne
Библиотека TimerOne
Купить на Aliexpress![]() Контроллер Arduino UNO R3 на CH340G
Контроллер Arduino UNO R3 на CH340G![]() Контроллер Arduino UNO R3 на Atmega16U2
Контроллер Arduino UNO R3 на Atmega16U2![]() Провода DuPont, 2,54 мм, 20 см
Провода DuPont, 2,54 мм, 20 см![]() Модуль скорости щелевой, LM393
Модуль скорости щелевой, LM393
Купить в Самаре и области![]() Контроллер Arduino UNO R3 на CH340G
Контроллер Arduino UNO R3 на CH340G![]() Контроллер Arduino UNO R3 на Atmega16U2
Контроллер Arduino UNO R3 на Atmega16U2![]() Провода DuPont, 2,54 мм, 20 см
Провода DuPont, 2,54 мм, 20 см![]() Модуль скорости щелевой, LM393
Модуль скорости щелевой, LM393
А есть возможность поставить диск 60-2 и чтобы он мог считать зубцы и через определенное количество зубцов включать твердотельное реле и через определенное количество зубцов выключать реле и тд
ошибка в схеме, вторая ножка микросхемы должен подключён между резисторами R3 и R4
уточните, данный датчик есть в каком либо симуляторе ? Если есть, то в каком ? Может быть у ас есть библиотека для Proteus 8? Заранее спасибо