
Сегодня расскажу как реализовать связь по CAN шине используя Arduino UNO и модуль MCP2515. CAN шина является основным протоколом связи в автомобилях, например блок управления двигателя, ABS и другими блоки. В качестве примера будем передавать данные с одного модуля MCP2515 на другой.
Технические параметры:
► Микросхема: MCP2515;
► Напряжение питания: от 2.7 до 5.5 В;
► Потребляемый ток: 5 мА (1 мкА в режиме ожидания);
► Максимальная скорость передачи данных: 1 Мбит/с;
► Интерфейс: SPI;
► Сопротивление: 120 Ом;
► Габариты: 40 × 18 × 14 мм;
► Вес: 7 грамм.
Общие сведенья
CAN (Controller Area Network) был разработан компанией BOSCH и выпущено в середине 80-х годов. Сначала применялась в автобусах и грузовиках, но сейчас можно встретить в автомобилях, кораблях, промышленности, тракторов и так далее. Кто хочет почитать больше информации о CAN протоколу, можно ознакомится с этой статьей.

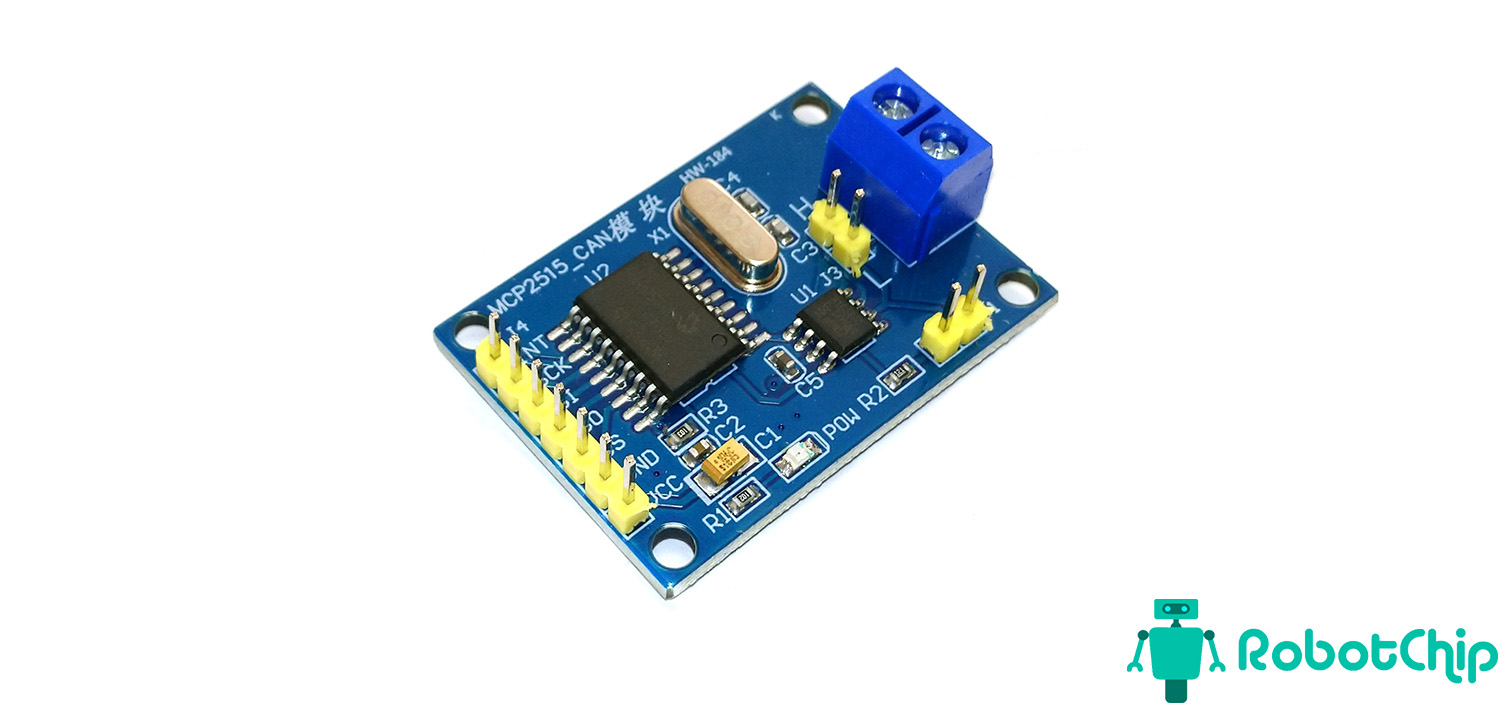
Так как контроллеры Arduino не содержит внутренний CAN, поэтому используется внешний контроллер MCP2515 (самая большая микросхема на модуле), для работы которого необходим кварц на 8 МГц и небольшая обвязка. Микросхема MCP2515 способна получать и передавать данные с CAN шины на микроконтроллер, через SPI наоборот. Так же, на модуле установлен трансивер TJA1050, которая физически соединяет MCP2515 с CAN шиной.
Для заметки, некоторые контроллеры, такие как ESP32, уже содержат внутреннюю периферию CAN, но им все равно нужен трансивер TJA1050 или MCP2551.

Модуль MCP2515 содержит три разъема, самый большой, это вывода интерфейса SPI, который состоит из 7 контактов, шагом 2.54 мм. Второй и третий, дублируются, и являются выводами шины CAN
Назначение контактов SPI:
► VCC и GND — выводы питания 5В;
► CS — вывод выбора ведомого устройства;
► SO — вывод SPI;
► SI — вывод SPI;
► SCL — тактовый вывод SPI;
► INT — вывод прерывания MCP2515.
Назначение контактов CAN:
► H — вывод CAN;
► L — вывод CAN.
Подключение MCP2515 к Arduino UNO
Необходимые детали:
► Arduino UNO R3 x 2 шт;
► Модуль MCP2515 x 2 шт:
► Провод DuPont, 2,54 мм, 20 см, F-M (Female — Male) x 1 шт:
► Кабель USB 2.0 A-B x 2 шт;
► Светодиод 5 мм x 1 шт;
► Тактовая кнопка х 1 шт;
► Резистор 330.
Описание:
В примере покажу, как реализовать связь между двумя контроллерами Arduino UNO, через CAN шину используя модуль MCP2515.
Подключение:
Сначала подключаем модуль MCP2515 и Arduino UNO, для этого вывода INT, SCK, SI, SO, CS, GND, VCC с MCP2515 подключаем к выводам 2, 13, 11, 12, 10, GND, 5B, аналогично для второй сборки Arduino UNO и MCP2515. Далее соединяем два модуля MCP2515, для этого вывод H и L, соединяем к H и L. Светодиод и кнопку подключаем по схеме показанной ниже.

Установка библиотек:
Для работы программы, необходимо дополнительно установить библиотеку «mcp2515«, скачать ее можно в конце статьи.
Программа №1 (передатчик):
Первый скетч, необходимо загрузить на Arduino UNO с кнопкой, она будет передавать данные ко второй Arduino UNO.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 |
#include <mcp2515.h> // Подключаем библиотеку mcp2515 #define button 8 // Указываем к какому выводу подключена кнопка struct can_frame canMsg; MCP2515 mcp2515(10); void setup() { pinMode(button, INPUT); // Устанавливаем вывод, как вход digitalWrite(button, HIGH); // Включаем подтягивающий резистор Serial.begin(115200); // Открываем последовательную связь mcp2515.reset(); // Перегружаем mcp2515 mcp2515.setBitrate(CAN_125KBPS); // Устанавливается скорость на 125 кбит\с mcp2515.setNormalMode(); canMsg.can_id = 0x0F6; canMsg.can_dlc = 1; } void loop() { int buton_1 = digitalRead(button); // Считывает значение с кнопки // Если HIGH выполняем функцию if (buton_1 == HIGH) { canMsg.data[0] = 0x20; mcp2515.sendMessage(&canMsg); } // Если LOW выполняем функцию else if (buton_1 == LOW) { canMsg.data[0] = 0x10; mcp2515.sendMessage(&canMsg); } delay(1000); } |
Программа №2 (приемник):
Вторую программу необходимо загрузить во вторую Arduino UNO, к которой подключен светодиод.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
#include <mcp2515.h> // Подключаем библиотеку mcp2515 #define led 8 // Указываем какому выводу подключен светодиод struct can_frame canMsg; MCP2515 mcp2515(10); void setup() { Serial.begin(115200); // Открываем последовательную связь pinMode(led, OUTPUT); // Устанавливаем вывод, как выход digitalWrite(led, HIGH); // Включаем подтягивающий резистор mcp2515.reset(); // Перегружаем mсp2515 mcp2515.setBitrate(CAN_125KBPS); mcp2515.setNormalMode(); } void loop() { if (mcp2515.readMessage(&canMsg) == MCP2515::ERROR_OK) { if(canMsg.can_id == 0x0F6) { int x = canMsg.data[0]; Serial.println(x); if (x == 0x10){digitalWrite(led, HIGH);Serial.println("ON");} if (x == 0x20){digitalWrite(led, LOW);Serial.println("OFF");} delay(200); } } } |
Вот принципе и все, будут вопросы пишите.

Ссылки![]() Библиотека mcp2515
Библиотека mcp2515
Купить на Aliexpress![]() Контроллер Arduino UNO R3 на CH340G
Контроллер Arduino UNO R3 на CH340G![]() Контроллер Arduino UNO R3 на Atmega16U2
Контроллер Arduino UNO R3 на Atmega16U2![]() Провода DuPont, 2,54 мм, 20 см
Провода DuPont, 2,54 мм, 20 см![]() Модуль контроллера шины CAN на MCP2515
Модуль контроллера шины CAN на MCP2515
Купить в Самаре и области![]() Контроллер Arduino UNO R3 на CH340G
Контроллер Arduino UNO R3 на CH340G![]() Контроллер Arduino UNO R3 на Atmega16U2
Контроллер Arduino UNO R3 на Atmega16U2![]() Провода DuPont, 2,54 мм, 20 см
Провода DuPont, 2,54 мм, 20 см![]() Модуль контроллера шины CAN на MCP2515
Модуль контроллера шины CAN на MCP2515
Спасибо за статью, очень помогло
Может будет кому то полезно но у меня данный скетч заработал только после того как я установил джамперы J1 на обоих модулях.